How to design the slip ring applied to underwater micro submersibles?
With the progress of human science and civilization, the according development underwater scene detection, resource surveying and other technologies are in urgent need. For instance, the design of underwater micro submersibles is at the start- point, still facing difficulties on many key technologies. In the key structure of sliding connection, the mainstream design adopts a rigid connection, which does not allow the micro-submersible to rotate underwater without displacement, and makes the data transmission unstable. Thus, this paper designs a conductive slip ring structure, aims to improve the flexibility of the movement of the underwater submersible and the life cycle of the device.
On the present market, the types of conductive slip ring are mainly divided into three: axial slip rings, disc slip rings and differential slip rings. The ring surface in the axial slip ring is distributed along the axial direction, and is stacked by multiple rings. The rings are isolated from each other by insulating sheets. the axial slip ring is high reliable, simple structure, low cost, but large volume. The rotor of a disc slip ring carries current and signals through multiple concentric rings. The concentric rings are separated by an insulating substance, and the brushes are distributed on top of the concentric rings as stator. The disc slip ring is small in size, but has a complex structure, high cost and high process requirements.
The differential slip ring uses the ring core to turn on the contacts of the upper and lower layers that rotate relative to each other through the differential structure. These slip rings are small in size and offer a large number of paths in limited space. However, the production of the ring core is difficult, the internal structure is extremely complex and the cost is high. Due to the features of environmental conditions for mini-submarine applications,this paper designs a conductive slip ring with stable connection, small size and simple structure. After solution demonstration, the conductive slip ring is located at the bottom of the submarine and at the intersection of the center of mass line and the lower surface of the air-frame. The sliding bearing structure in the conductive sliding ring is directly fixed to the connecting line (the internal connecting line of the sliding bearing is directly fixed to the raised contact on the sliding bearing).
The sleeve and the sliding bearing are tightly bonded through the C-shaped sliding ring chute when the sleeve fixed to the top of the submarine rotates against the sliding bearing fixed to the connecting line. There are two grooves in the sleeve structure design, chute stator structures directly located inside the grooves. Whenever the submarine is rotating, the raise contacts on the sliding bearing slide around inside the chute and directly contact with the stator inside the chute, thus the circuit is connected. So that the submarine in the steering positioning will not be the torsion force of the connecting line to obtain high flexible performance, and meanwhile, it would not cause any damage to the wired connection. The raised contacts contact the stator stably by the help of the sliding bearing, which guarantees the stable electrical signal and data transmission .
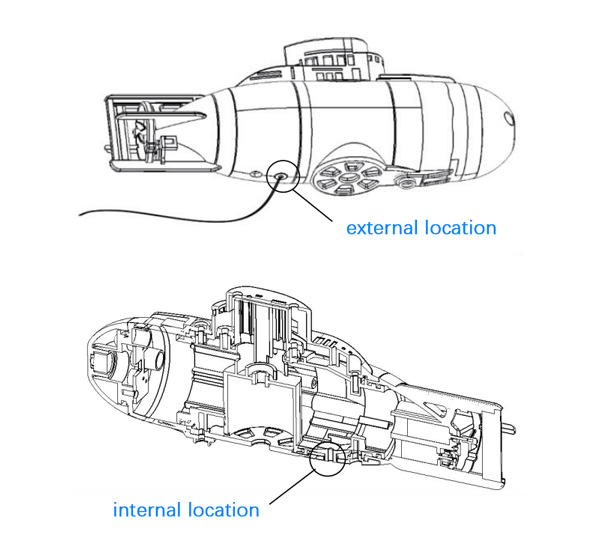
Figure 1 shows the overall three-dimensional structure of the submarine. The external and internal structure are designed for the underwater application of the submarine.
Structure Design of the Conductive Slip Ring
1. Overall Structure Design
This design adopted the conductive slip ring structure at the connecting part of the connection circuit and the submarine. The structure is mainly composed of sliding bearing and sleeve, which can supply power, transmit data information and solve the problem of the flexibility of the micro submersible movement at the same time.
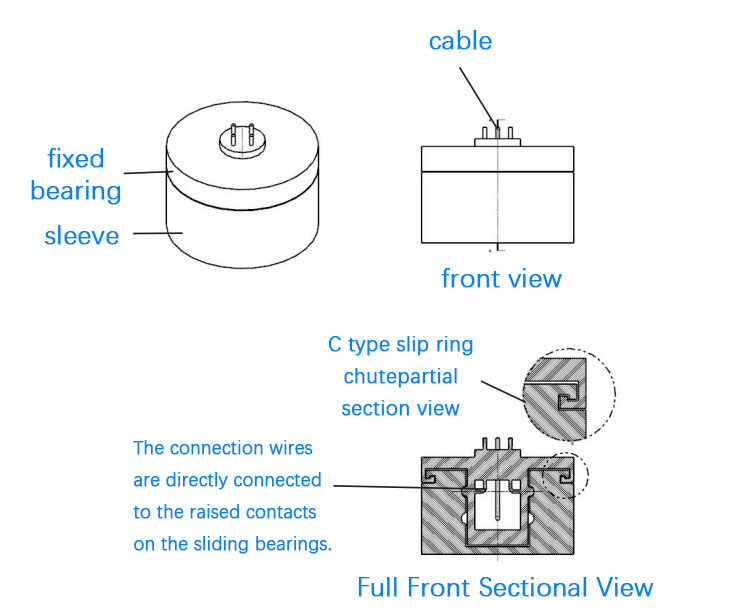
Connecting circuit connected to the fixed bearing (Figure 2), in the front full section view, it can be intuitively seen that the connecting line is directly fixed to the raised contact on the sliding bearing and the sleeve is fixed to the bottom of the submarine. he conductive slip ring structure can realize the free and unlimited rotation of the stationary submarine around the fixed bearing. At the local cross-section site, the sealing method adopted is the combination and interlocking of C-shaped slip ring and groove. When the submarine is operating normally, the relative rotating speed of sliding bearing and sleeve is extremely slow. Therefore, the conductive slip ring is oil-sealed between the sleeve and the fixed bearing.
2. Design of the Wiring Structure of the Sliding Bearing
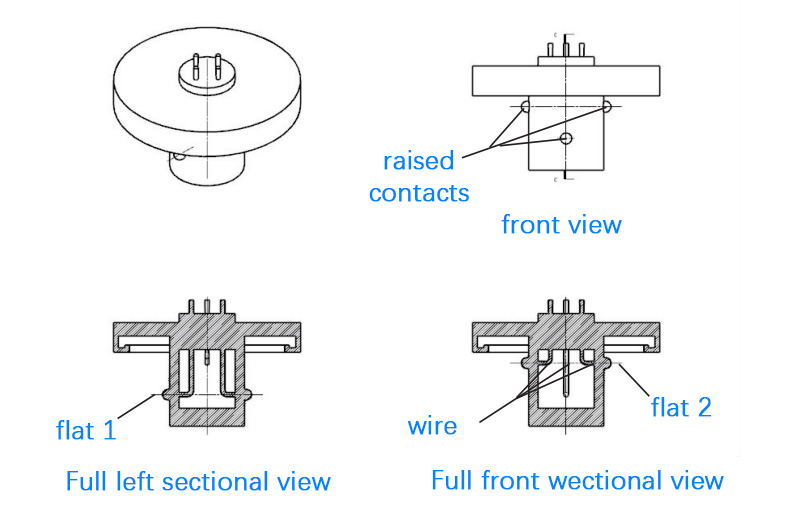
On the upper side of the sliding bearing, the connecting line is fixed to the sliding bearing. Inside the sliding bearing, there are 4 connecting lines are directly connected and fixed with the 4 raised contacts respectively. The sliding bearing has two raised ball contacts evenly distributed in surface 1 and 2 to make sure that the center of mass is at the center of the bearing circle, and the stability of the submarine under rotating status.
3 Design of the Sleeve Structure
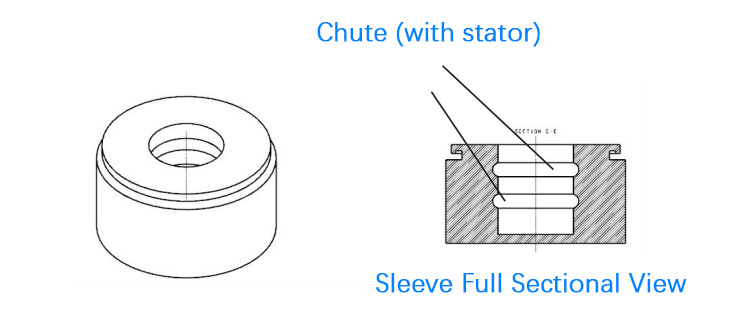
There are two grooves inside the sleeve. When the submarine turns, the sliding of the raised contacts makes the sleeve in the groove rotate relatively. And the raised contacts are always in direct contact with the stator of the inner wall of the bearing sleeve. The result is that the relative sliding not only ensures the real-time of the information transmission but also ensures the stability. The internal structure of the sleeve requires strict sealing to prevent the sleeve water from filling the sleeve with oil as shown in Figure 4.
Life Calculation of the Conductive Slip R ring at Relative Loss
When the micro-submarine works in the water, only when the submarine turns, the conductive slip ring will rotate relative toactual operation. Therefore, the maximum actual working time of the structure is much lower than the working time of the submarine for about 3.5 h. And the requirement of the rotating speed of the conductive slip ring is very low in the actual application scenarios, for about 10 r/min. The total number of rotating of the conductive slip ring is about 6,500,000 r. When the sliding bearing and sleeve are rotating, the raised contact on the bearing and the stator on the sleeve are directly contact that relative movement occurs. Trace amount of loss due to contacts and frictions, the loss amount can be obtained by measuring the volume. In order to ensure that the service life of the conductive slip ring in the underwater micro-submarine [6] can meet the basic requirements, the loss of the rotor must be controlled within a certain range. The part between the stator and rotor should be point contact and grease lubrication with little friction.

K is the working years under the normal working conditions of the conductive slip ring; ΔPis the mass loss range of each stator (1.9g ≤ΔP≤2 g); ε is the number of relative rotation of the sliding bearing per day(ε ≤2000 r/d); is the mass consumed per 1 rotation of the stator (ω = 0.3 μ g / r)

The kmin is the shortest working life range of the conductive slip ring; ε Max is the average number of rotations per day (the average daily rotation of the conductive slip ring is ε max = 2 000 r / d); To check and calculate the minimum working life [7] of the conductive slip ring, due to the special application, let the daily average limit operating state of the conductive slip ring be ε max = 2 000 r / d. Thus, by checking, the shortest service life of the micro-submarine is kmin = 8.7 ~ 9.1 years, which can meet the life cycle requirements of underwater micro-submarine.
Design of Physical Product Structure
According to the structural design of the conductive slip ring in the submarine, the position of the conductive slip ring on the stability of the micro submarine, the sealing treatment of the conductive slip ring and the actual working depth test of the submarine have a direct impact on the feasibility of the physical product of the submarine.
1. Optimizing the overall stability of the micro-submarine accordingly. The slip ring structure is located at the center of mass at the bottom of the micro-submarine. The sliding bearing structure on the top of the conductive slip ring is directly fixed with the connection line, which greatly reduces the traction of the connecting line to the submarine and avoids the serious interference of the connecting line to the sensitive movement of the submarine.
2. For the working water volume and diving depth of the micro-submarine, and considering its motor driving power, grease is added between the sliding bearing and the sleeve to test the sealing. The test result proves that the sealing of the submarine fully meets the normal practical requirements when the diving limit depth of the micro submarine is 15 m.
3. The sealing and power parts have been partially modified and the physical are produced as shown in Figure 5. The actual water test proves that the actual working depth of the submarine is 10~ 15 m.
The micro-submarine can be actually applied to the aquarium industry, aquaculture industry, underwater exploration and other industries. At present, by matching power adapter and the home power, the product can be continuously operated for 10 hours. Andthrough the operation button,the submarine can suspend in the water, linear submersible in the same depth and make turns 360°. Inside the submarine is equipped with a water absorption tank structure for water absorption and drainage, and it has realized the vertical direction of stable diving and floating movement. The main tasks are finished, and the micro submarines have been equipped with visual and infrared sensors. It has been able to interact with user handheld devices through Internet of Things and merge into the Internet through WiFi bridging technology.
Summary
In the experiment, the structure design of underwater microsubmersible realized the positioning rotation meet the requirement of unlimited rotation of the submarine in the water operation. The design improved the flexibility of the overall movement, strengthen the stability and efficiency of data transmission. It is able to meet more complex underwater environment, and greatly improved the comprehensive performance. The submersible is widely used, low restrict and high performance, which has a very broad market potential.